

手术机器人不是只有“达芬奇”听说过“hinotori”和“ROSA”吗?
手术辅助机器人“达芬奇”,许多了解医疗知识的人已经都很熟悉了。它是一个高级机器人外科手术系统,通过使用微创的方法,实施复杂的外科手术。虽然叫机器人,但它是由医生完全控制的!机器人只是一个手术辅助系统,不可能在没有医生参与下进行任何活动。
大家可在日本就医网官网或公众号搜索“达芬奇”进行详细了解,这里就不赘述了。今天是要告诉大家,手术机器人可不是只有“达芬奇”。还有“火鸟”和“罗莎”。
“hinotori™”火鸟
“hinotori™”是日本Medicaroid株式会社开发的日本首款实用型内镜手术辅助机器人。它具有连接手术器械和内窥镜的四个手臂,医生可以在远离患者身体的操控台中检查内窥镜的3D图像并远程操作手臂,进行精准的手术。
2021年9月,藤田医科大学医院在肾脏和泌尿外科领域开始临床应用。2022年10月,在胃肠外科领域开展胃癌切除术。这是世界上第一个在泌尿外科领域之外使用 “hinotori™”的手术。

(图)2022年10月使用hinotori™进行胃癌切除术。外科医生、麻醉师、护士和临床技师等多学科医务人员通力合作。 外科医生坐在离手术台不远的操控台上,远程操作手臂。

日本Medicaroid公司成立于2013年,是日本川崎重工业有限公司和Sysmex公司的合资企业。它于2015年开始开发日本国内生产的手术机器人,并于2020年12月推出hinotori™。
“hinotori™”这个名字取自漫画家兼医生的手冢治虫的漫画《火鸟》。基于“服务和支持人类”的机器人概念,“hinotori™”标志还采用了“火鸟”设计。

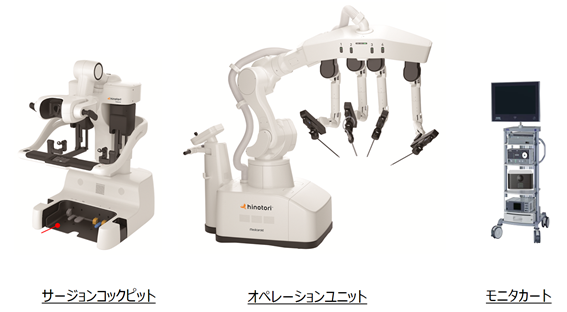
和“达芬奇”相似,“hinotori™”由3个部分组成:外科医生控制台、床旁机械臂系统、成像系统。
执行手术操作的手臂具有类似于人类手腕关节的设计。
医生控制台采用人体工程学设计,以适应外科医生的姿势。它减轻了外科医生的身体负担并支持无压力手术。
成像系统在控制台内以3D形式投射高清内窥镜图像,旨在支持外科医生和助理医生之间的顺畅沟通。
目前藤田医科大学拥有“hinotori™”3台。
“hinotori” 和“达芬奇”有什么区别?
日本腹腔镜手术的先驱,1997年实施日本第一例腹腔镜全胃摘除手术。2012年兼任达芬奇微创手术中心主任,是众所周知的倡导机器人手术的领导者。
宇山一郎教授如此评论:
两者的基本结构是相同的,即医生在远离病人床边的箱形控制台确认内窥镜的三维图像时,远程移动连接有手术器械的手臂。
平时我们一直把这些机器叫做“机器人、机器人”的,它的正式名称是"内窥镜手术支持设备"。顾名思义,它不协助开腹手术,只是协助内窥镜手术,如腹腔镜和胸腔镜,是微创手术,因此对病人来说更加温和。为了便于从外部进入,器械的尺寸比直接用手插入时要长。在紧张或做细微动作时,手的颤抖程度会变大。而“达芬奇”正是为了弥补目前内窥镜手术的固有缺陷而设计的设备,它不会颤抖。hinotori的设计理念也是一样的。
如果我们把他们俩比作一辆车,区别肯就是就在于乘客对进口车和国产车的偏好,但只要他们能舒适地到达目的地,选择哪一种并不重要。在能够准确安全地进行手术方面,达芬奇和hinotori之间没有本质区别。
“ROSA”:骨科手术机器人系统“罗莎”
ROSA (Robot of Stereotactic Assistant,ROSA)系统是2007年由法国Medtech公司研发的用于神经外科和骨科手术的手术辅助机器人。特别是ROSA Knee系统集成了全膝关节置换手术程序,配备了各种功能,可以更准确地支持外科医生的手术,例如调整软组织的平衡和确定股骨的旋转。为了使人工关节像原始人体关节一样自然移动,重要的是人工关节放置在适当的位置。然而,植入物的放置在很大程度上取决于外科医生的经验,包括截骨的量和角度。ROSA由机器人引导保证准确性,无论医生技术水平如何,都可以获得良好的手术效果。
2019年,藤田医科大学医院为实现更安全、更安心的全膝关节置换术,在日本首次引进了骨科手术辅助机器人“ROSA Knee System ”。通过使用“ROSA”协助全膝关节置换术中的骨切除和定位植入物,以实现手术微创化并降低并发症风险。
“ROSA”有三个特点:
1.机器人手臂被引导到适当的切骨位置,可进行准确定位。
2.可通过数据分析纠正手术计划中的误差,使手术更安全、更有保障。
3.机器人手臂可以进行微调,如植入物的位置,骨切除的角度。
外科医生可以根据数据以类似于正常手术的方式进行手术,无论技术水平如何,都可以期待良好的手术效果。
藤田医科大学病院使用“ROSA”进行的“人工膝关节置换术”已经超过350例。目前,ROSA已经被纳入了“人工股骨头置换术”。

ROSA Knee 系统

使用ROSA的骨切除手术